© Gerardo Rivero Roel, marzo 2013. Se permite la reproducción de este artículo citando su origen y autor.
www.lctm.info, www.lctm.es y www.marklinistas.com son sitios independientes y no tienes relación
alguna con Gebr. Märklin & Cie. GmbH y sus representantes.
Esta página está diseñada para verse a una resolución mínima de 1024 puntos de ancho y en las versiones más recientes de los exploradores.
Contacto: editor@lctm.info

Cargando foto de la base de datos de Märklin ...
Trix 22755 · Mak G 1206
Adaptación a 3C y digitalización
Marzo 2013

Märklin y Trix comparten muchos modelos, ya sean originales de una marca u otra. Si analizamos máquinas similares, vemos que los componentes característicos de cada sistema son fácilmente intercambiables. Por ello, en principio, la conversión de un de estos modelos Trix 2C al sistema 3C no debería presentar ninguna dificultad. En este caso, a causa de diferencias en el cableado del conector NEM y del poco espacio disponible, y mas tarde al comportamiento rebelde del decoder, la tarea resultó mas complicada de lo esperado. Resueltos estos problemas, el trabajo se concluyó con éxito.
El modelo de Trix.
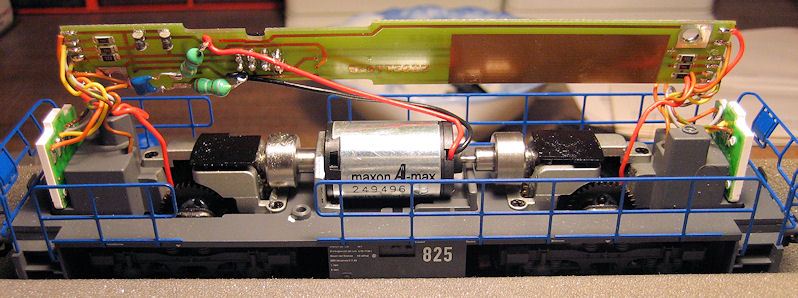
De la locomotora diesel MaK G 1206 existen bastantes modelos en ambos catálogos, aunque con libreas diferentes en muchos casos. Para aumentar mi colección de material de la empresa RAG Bahn-Hafen, al no estar disponible esta versión en Märklin, conseguí este modelo de Trix, 2C evidentemente, sin digitalizar y con conector NEM. Equipa un motor cilíndrico Maxon A-Max con dos volantes de inercia y transmisión al los bogies por tornillos sin fin y engranajes. Es un modelo todo metal con un acabado perfecto y buen rodaje. Las luces son por LED SMD amarillos y rojos.
Ya al abrir la locomotora se anuncia uno de los problemas que se presentaron mas tarde; el espacio libre entre la carcasa y el chasis es nulo, asomando incluso la tapa del conector NEM por la cabina. El único espacio libre en el chasis está entre la placa de circuitos y la transmisión del bogie trasero, ahí iría el decoder. En la carcasa, en los laterales de la cabina, parece haber un lugar reservado a este, pero aún así se verían los cables desde fuera.

Manos a la obra.
Inicio de página
Materiales.
- Lógicamente una locomotora Trix cod. 22755, 2C analógica.
- Decoders: En principio un ESU LokPilot 2, y posteriormente un Märklin procedente del kit de altas prestaciones 60760.
- Patín Märklin, repuesto cod. 209217.
- Equipo de medida y diagnóstico: Polímetro (a mi me gusta el mío analógico), fuente de alimentación 12 V. C.C., Control Unit 6021, vía de prueba.
- Herramientas: Soldador 15 W, punta lo mas fina posible; alicates, de corte y pelacables; destornilladores; pinzas finas de buena calidad, lupa (o buenas gafas) para comprobar las soldaduras conflictivas.
Instalación del patín.
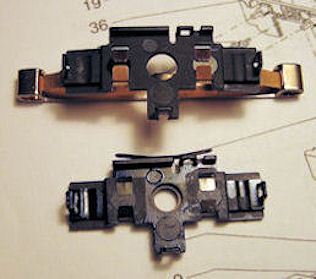
En primer lugar retiré la pieza con los contactos a las ruedas de uno de los bogies, que es equivalente en cuanto a su diseño al patín de Märklin. En la foto se pueden ambas piezas. Para sacar este elemento es conveniente retirar previamente la carcasa del bogie de plástico, lo que facilita bastante la manipulación, pues hay que soltar 4 clips. Una vez restituida la carcasa, simplemente presionando se coloca el patín. En una máquina 2C las ruedas de ambos lados están aisladas unas de otras; es por ello que al quitar los contactos originales las ruedas de un lado del bogie modificado se quedan sin conducir corriente alguna. Es aconsejable, en este caso, situar el patín en el bogie con mas bandas de adherencia, ya que no van a hacer contacto. Así mismo, en el otro bogie se mantienen los contactos originales, cambiando el cable (rojo) de alimentación a un contacto de masa. Así nos aseguramos el mayor número posible de ruedas con contacto a los carriles de la vía. Es imprescindible antes de pasar a instalar el decoder, comprobar exhaustivamente con el polímetro que no existe ninguna continuidad entre el patín y las ruedas.
Conexión del decoder.
En principio elegí un LokPilot 2 de ESU, que ya viene con conector NEM y presenta una gran variedad de ajustes para toda clase de motores. En teoría, sólo hacía falta retirar la tapa del conector en la loco, que hace posible su funcionamiento en analógico, y enchufar el decoder. Hay que tener mucho cuidado en colocar el conector en la posición adecuada, pues no tiene ningún seguro de polaridad. La construcción del conector, en ambas partes, es bastante pobre, no usándose material éstandar, simplemente un pequeño trozo de placa con los pines soldados. Una vez enchufado el LokPilot, y puesta la máquina en la vía, verifiqué que respondía a las órdenes de la 6021. El decoder trae de fábrica la dirección 03. Con los parámetros por defecto el arranque no resultó nada suave, a veces incluso no llegaba a arrancar, forzando el motor. El frenado progresivo resultaba excesivamente largo. Decidí ajustar los parámetros del decoder más tarde. Al probar las luces, ví que no respondian. Una vez comprobado que no había ningún cable suelto, verifiqué con el polímetro que el cable correspondiente del decoder (blanco: delanteras, amarillo: traseras) entregaba tensión respondiendo al control, siendo el resultado positivo: por lo tanto el fallo no estaba en el decoder.
Me pregunté si podría haber alguna diferencia en el funcionamiento para 2C y 3C en las luces, cosa bastante improbable ya que, una vez instalado el decoder,
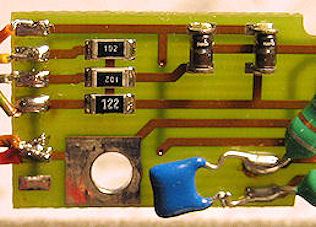
el funcionamiento es idéntico para ambos sistemas. No me quedó mas remedio que levantar la placa de circuitos de la loco, y empezar a investigar. Para ello me
ayudé del polímetro y de una fuente de alimentación de 12 V. C.C. Aplicando tensión a las resistencias limitadoras de los LED, estos se iluminaban, confirmando
su correcto funcionamiento. Siguiendo el trayecto de las pistas de la placa, descubrí el fallo: el polo común de los LED está conectado al pin correspondiente
a F1 en el conector NEM del decoder, estando el correspondiente al polo común sin conexión.
Intercambié estos cables, y las luces encendieron respondiendo
perfectamente al sentido de marcha.
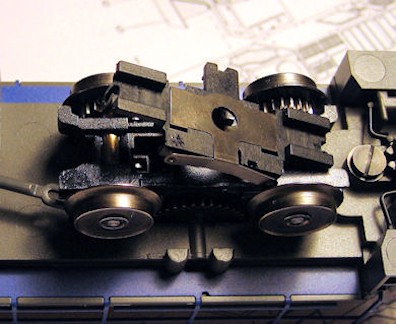
Una vez realizada la conversión sólo me quedaba colocar el decoder definitivamente en su sitio, organizar bien los cables y
cerrar la locomotora. El único sitio disponible para el decoder es debajo de la placa, sobre la transmisión (sombreado en verde en la foto), sujetándolo con
cinta de doble cara.
Sin embargo la tarea de organizar los cables, sencilla en la mayoría de los casos, supuso el mayor problema de este trabajo, llevando
al extremo de tener que volver a cablear completamente el sistema, a causa del poco espacio disponible para alojar el exceso de cables. Asimismo la conexión al
conector NEM resultaba problemática, pues aunque la placa presenta unos rebajes para pasar los cables, era casi imposible cerrar la carcasa. Además desde el
exterior, a través de las ventanillas de la cabina se veía el conector, efecto bastante antiestético.
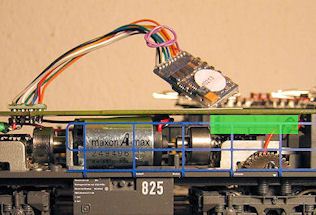
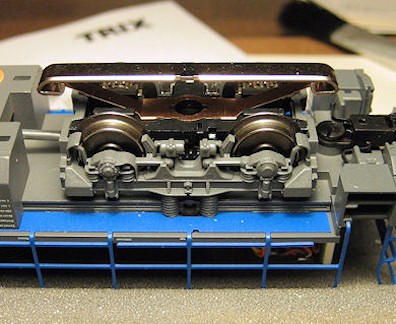
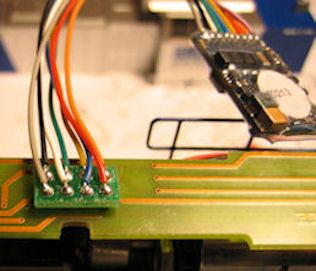
Para mas complicación, era casi imposible evitar que los cables rozaran con los volantes de inercia. La única solución era eliminar el exceso de longitud en los cables, y prescindir del conector NEM, eliminando los contactos soldados a la placa y cableando de la manera mas directa posible. También acorté los cables que conectan los dos testeros de luces. En la foto de abajo se puede ver la posición del decoder y como hay menos cables. Los cables sueltos de arriba son los de función que no se han usado, a los que se les ha aislado la punta.
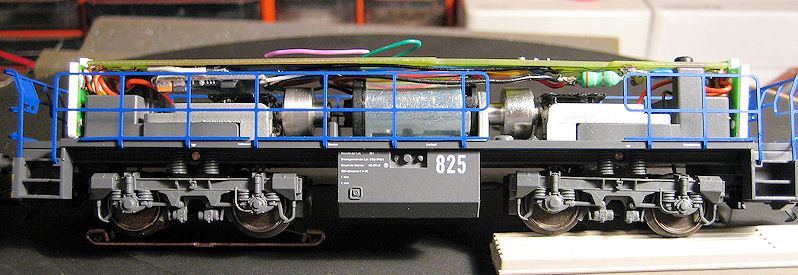
Una vez realizada esta tarea, pude cerrar la locomotora, quedando lista para su configuración.
Programación.
El manual del LokPilot 2,
traducido excelentemente al castellano por los Sres. Marcos y Viana, es bastante completo,
indicando todas las CV's necesarias para ajustar óptimamente su funcionamiento. Las únicas que toqué en principio fueron la dirección y las correspondientes
a la compensación de carga, CV 54 y CV 55, que de acuerdo al manual, y al tratarse de un motor Maxon, puse en 7 y 5 respectivamente,
sin obtener mejores resultados . También cambié los valores de la aceleración/frenado (CV's 3 y 4) y velocidades máxima y media (CV's 5 y 6), con idénticos
resultados.
Para programar el decoder uso la Control Unit 6021, siguiendo el procedimiento que también se explica en el manual del LokPilot. Este procedimiento es bastante
tedioso, ya que hay que anotar los valores que vayamos introduciendo para saber por donde vamos, y dadas las diversas CV's a ajustar, y que algunas repercuten
en el comportamiento de otras, puede llegar a ser bastante largo. Si vamos a usar decoders ESU habitualmente, es muy recomendable el LokProgrammer, que permite
su total configuración desde nuestro PC, incluyendo a los mfx y LokSound.
Cambio de decoder.
Simultáneamente a la conversión de esta máquina estuve instalando los nuevos kits 60760 en un par de locos Märklin con motor de 3 polos y electrónica Delta. Aburrido de probar una y otra vez la programación del LokPilot sustituí, a modo de prueba, este por uno de los decoders incluídos en los kits de Märklin. Al ponerla en la vía de pruebas, pude comprobar que el comportamiento de la MaK resultaba perfecto: arranque muy suave y progresivo, frenado exacto, y muy buena estabilidad de marcha. Ante la aburrida perspectiva de seguir cambiando CV's en el LokPilot, decidí dejar el 60760 en esta máquina, dado su buen comportamiento, y reservar el anterior junto con el motor de 5 polos del kit para futuras digitalizaciones.
Observaciones finales.
Inicio de página
El problema del conector NEM.
Según la norma NEM 652, el conector mediano (8 pines) sigue el esquema de pines y de colores de cables de la tabla de la derecha. El esquema de ESU (en el manual), y el conector del decoder siguen la misma disposición. Sin embargo el conector de TRIX tiene el común de funciones en la posición 3, que aunque en la norma está sin conexión, normalmente corresponde a la tecla de función F1.
| 1 | Motor 1 | Vía dcha./Patín | 8 |
| 2 | Luz trasera | Común funciones | 7 |
| 3 | N/C | Luz delantera | 6 |
| 4 | Vía izquierda/Vías | Motor 2 | 5 |
El exceso de cables.
Para una locomotora con tan buen grado de acabado, es excesivo el cableado necesario para su funcionamiento, dado el poco espacio disponible. Se podría haber condensado todo el cableado clásico en una sola placa de circuito impreso. Además el sistema de conexión del decodificador según NEM, podría mejorarse en el futuro mediante conectores más compactos y fiables (*). En el modelo de Märklin el decoder se integra en la placa, lo que simplifica mucho el cableado.
La programación del LokPilot.
Este versátil decoder de ESU es muy apreciado por los aficionados, dada su gran variedad de ajustes mediante sus numerosas CV's. En este caso esta ventaja se tornó en inconveniente, al resultar realmente complicado ajustar las correspondientes al motor de un modo satisfactorio. Estas CV's incluyen voltaje de arranque, aceleración, frenado, velocidad máxima y media, referencia de control, parámetros K e I y zona de influencia de la compensación de carga... De acuerdo a la experiencia de algunos compañeros de LCTM, ajustar estas variables es un proceso de prueba y error que puede resultar realmente frustrante. Sería interesante disponer para su consulta de una base datos sobre los ajustes óptimos en cada tipo de motor.
(*) En el momento de la revisión de este artículo muchas máquinas de Trix y Märklin equipan conectores de 21 pines, mucho mejor realizados.
Texto y fotos propiedad del autor.
Märklin y Trix son marcas registradas de Gebr. Märklin & Cie. GmbH.
ESU y LokPilot son marcas registradas de ESU electronic solutions ulm GmbH & Co. KG.
Marzo 2013.